Неизвестный танк часть 5 - 13
- Опубликовано: 23.04.2016, 13:59
- Просмотров: 125786
Содержание материала
ПРИВОД УПРАВЛЕНИЯ МНОГОСТУПЕНЧАТЫМИ МЕХАНИЗМАМИ
Если механизм поворота имеет не одну, а несколько ступеней (несколько расчетных радиусов), привод управления будет более сложным, так как в таком механизме больше тормозов или фрикционов, которые должны при различных положениях рычага управления вступать в работу и прекращать ее.
Для примера рассмотрим принципиальную схему привода управления двухступенчатым планетарным механизмом поворота (рис. 517).
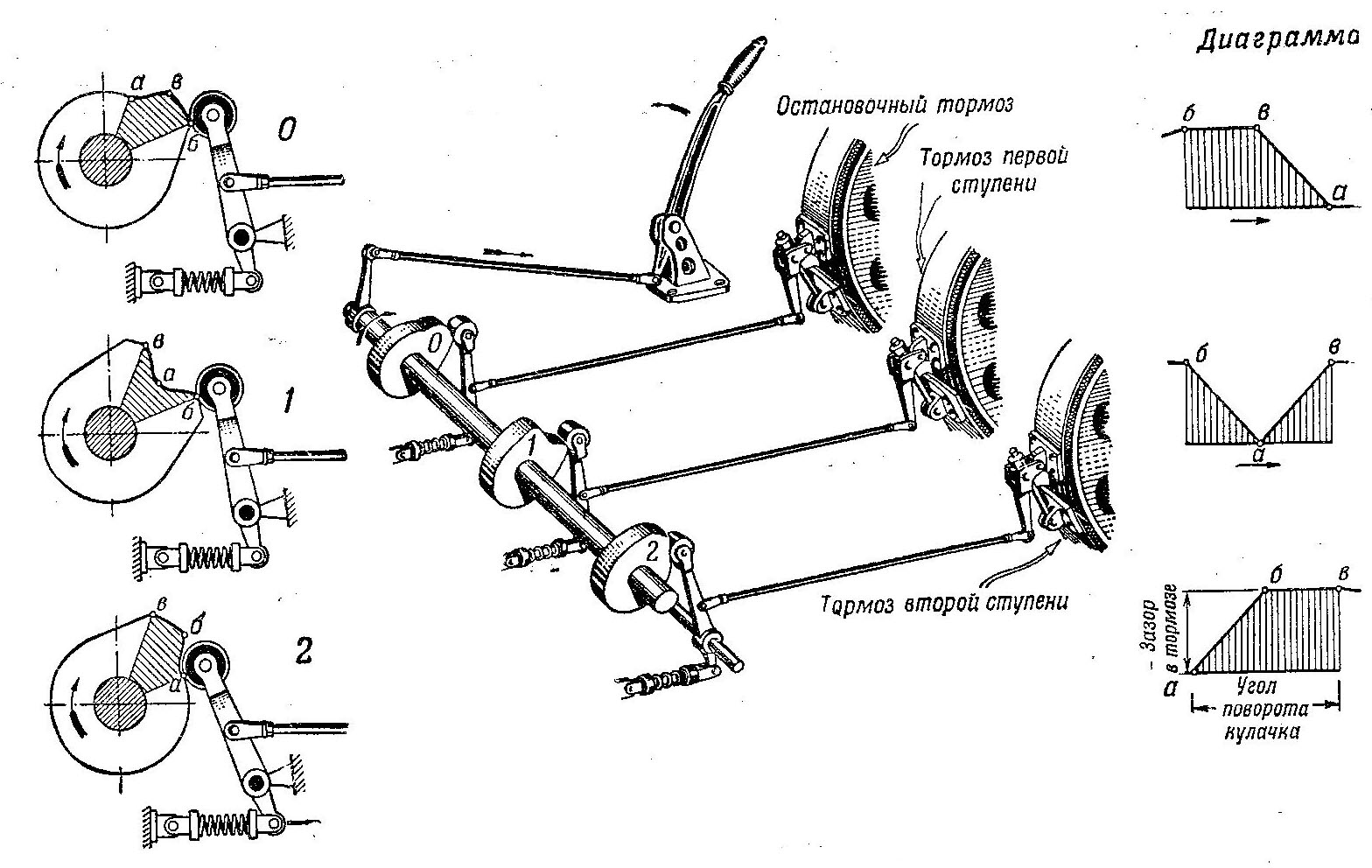
Рис. 517 Работа привода управления двухступенчатым механизмом поворота танка
В этом механизме два тормоза планетарных передач и один остановочный тормоз. Один из тормозов планетарных передач может быть заменен фрикционом, работа привода при этом не изменится. Для управления тремя тормозами служит валик с тремя различными по форме кулачками. Каждый из кулачков при повороте валика действует на ролик, связанный тягой с одним из тормозов. Ролик всегда прижат пружиной к кулачку. Пружины стремятся разжаться и тем самым затянуть тормоз.
Когда рычаг управления находится в крайнем переднем положении, в механизме включена вторая передача (ступень). Тормоз этой передачи затянут до отказа и удерживается в этом положении пружиной,. остальные два тормоза отпущены. Ролик 2 этой передачи (рис. 517, внизу) входит в выемку кулачка у точки а, но не касается его, так как тормоз полностью затянут (зазор между лентой и барабаном равен нулю, см. диаграмму справа). Легко понять, что, если бы ролик касался кулачка,. полной затяжки не было бы. Другие два ролика (1 и 0на рис. 517) касаются своих кулачков в точках б. Значки не дают пружинам переместить тяги и затянуть тормоза; оба тормоза отпущены (по диаграмме зазор между лентой и барабаном наибольший). Сила сжатых пружин не передается рычагу управления, так как линия действия сил проходит через ось валика, на котором сидит кулачок, как в рассмотренном выше случае с разделителем.
При движении рычага управления по стрелке валик поворачивается. Кулачок 2, действуя на ролик, двигает тягу, отводя ролик и отпуская тормоз. Вторая ступень выключается, и зазор в тормозе увеличивается (см. диаграмму). Одновременно кулачок 1освобождает ролик первой ступени, и тормоз этой ступени под действием пружины затягивается; зазор между лентой и барабаном тормоза постепенно уменьшается до нуля. Ролик 0остановочного тормоза катится по нерабочему профилю кулачка, так что остановочный тормоз не затягивается, и зазор в нем остается прежним (участок б-в верхней диаграммы).
Так продолжается, пока ролик 2 не дойдет до точки б, ролик 1 — до точки а и ролик 0 — до точки в. В тот момент, когда ролики 2, 1 и 0достигнут указанных точек, первая ступень полностью включится.
При дальнейшем движении рычага ролик 2 катится по нерабочей поверхности б-в кулачка, и зазор в тормозе второй ступени остается постоянным (участок б-в нижней диаграммы). Кулачок 1, нажимая на ролик (участок а-в средней диаграммы), выключает тормоз первой ступени, зазор в тормозе увеличивается, и первая ступень выключается. В то же время кулачок 0освобождает ролик, катящийся по участку в-а, и пружина затягивает остановочный тормоз. Движение рычага управления в обратном направлении приводит тормоза в действие в обратном порядке.
Сравнивая рассмотренный нами привод управления с приводами для более простых механизмов, нетрудно убедиться, что последние представляют собой более или менее сложные варианты основной схемы. Для одноступенчатого механизма (бортовой фрикцион с тормозом) достаточно двух кулачков (вместо трех), а для упрощения устройства один кулачок можно заменить прорезью в видке тормозной тяги (см. рис. 514).
Если отказаться от разделения сил, например на легком танке, кулачки могут быть заменены двумя тягами, из которых одна будет с прорезью (см. рис. 513) или двумя рычагами разной длины (рис. 518).
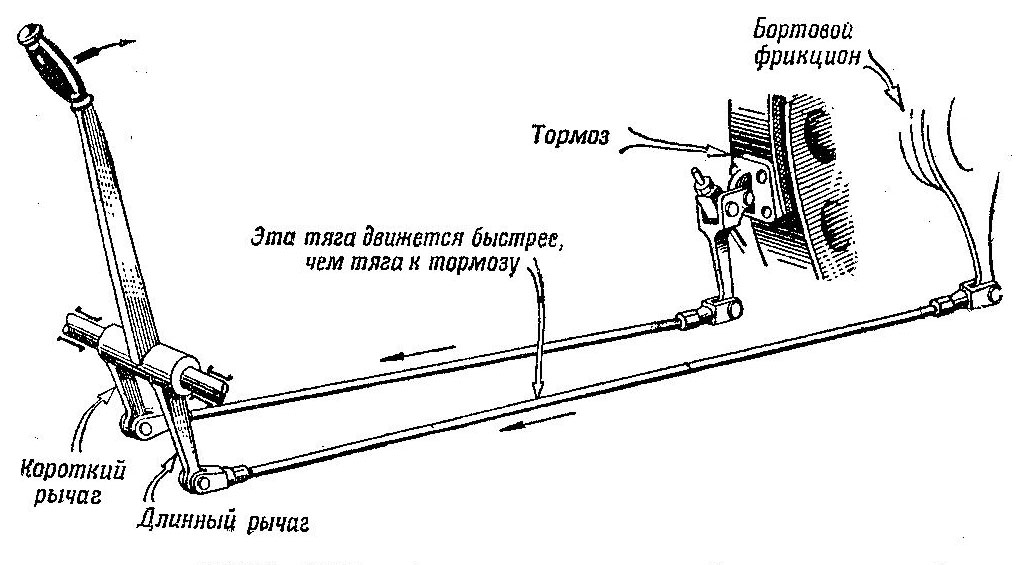
Рис. 518 На легких танках иногда применялся простой привод, имеющий дварычага разной длины
Короткий рычаг связан тягой с тормозом, длинный — с бортовым фрикционом. Так как тяга длинного рычага перемещается быстро, фрикцион выключится раньше, чем затянется тормоз.
Наконец, для дифференциала требуется всего один кулачок, поэтому рычаг управления можно соединить тягой непосредственно с тормозом так же, как это было показано на рис. 512.
Для управления механизмами поворота применяют сервоустройства, подобные рассмотренным выше устройствам для выключения главного фрикциона и переключения передач. В этом случае рычат управления механизмами поворота воздействует на клапаны (краны) , через которые сжатый воздух или жидкость проходит в рабочие цилиндры. Когда какой-нибудь цилиндр включается, соответствующий тормоз затягивается (или фрикцион выключается), когда тот же цилиндр выключается — тормоз отпускается.
РЕГУЛИРОВКА ПРИВОДОВ
Приводы управления регулируются с целью обеспечитъ нужную последовательность, а также своевременное начало и конец работы каждого из тормозов илифрикционов. Это достигается установкой роликов и ку-лачков (пальцев в прорезях тяг) в строго определенном взаимном положении друг к другу.
Фрикционные механизмы необходимо заранее отрегулировать. Фрик-ционы надо отрегулировать на полное включение и выключение; в тормозах должен быть отретулирован нормальный зазор между лентой (колодкой, если тормоз колодочный) и барабаном.
Неправильная регулировка механизмов и приводов управления приводит к нарушению работы механизмов поворота, (вследствие чего танк поворачивается плохо или совсемне поворачивается. Так, если остановочный тормоз затягивается слишком рано, он тормозит отстающую гусеницу, не отключенную от двигателя, т. е. к тормозу подводится мощность двигателя. Двигатель при этом может заглохнуть, а тормоз прийти в негодность от чрезмерного нагрева. Если эазор в тормозе слишком велик, соответствующая передача (ступень) механизма поворота не включается полностью, танк не поворячивается с расчетнымм радиусом, а тормоз все время буксует и перегревается.
ТРАНСМИССИИ С ДВОЙНЫМ ПОДВОДОМ МОЩНОСТИ
В рассмотренных выше трансмиссиях механизмы поворота работают независимо от других механизмов трансмиссии в том смысле, что устройство последних ни в какой мере не влияет на радиусы поворота танка и на расход мощности в тормозах. В частности, замена в трансмиссии одной коробки передач другой, с другим числом передач и другими передаточными числами, непосредственно не отразится на (поворотливости танка; его влияние скажется лишь косвенно, поскольку силы тяги и скорости движения танка изменятся.
При обычном разделении трансмиссии на два самостоятельных узла. — коробку передач для прямолинейного движения, механизмы поворота для осуществления поворота — автоматической связи между скоростью танка и радиусом его поворота не будет.
Однако в некоторых трансмиссиях такая связь существует: при большой скорости движения поворот совершается только с большими радиусами, при малых — с любыми, не исключая и самых малых, необходимых для обеспечения достаточной маневренности танка.
Трансмиссии такого типа называются трансмиссиями с двойным подводом мощностьтак как мощность к механизмам поворота подводится в них двумя потоками. В таких трансмиссиях механизмы поворота и коробка передач работают как одно целое. Существен ной особенностью этих трансмиссий является наличие различных радиусов поворота на каждой передаче вкоробке передач. Таких радиусов обычно бывает один, реже два, поэтому общее число расчетных радиусов поворота танка равно обычно числу передач коробки, т. е. не менее четырех. Высшим передачам (большим скоростям) соответствуют большие радиусы поворота, низшим—малые.
Трансмиссии подобного типа могут различаться по устройству, но все они объединены одной общей чертой: их механизмы поворота имеют двойную связь с двигателем — через коробку передач и помимо нее; поэтому такие трансмиссии несколько сложнее рассмотренных нами обычных трансмиссий, что является их недостатком.
Остановимся на схемам двух трансмиссий с двойным подводом мощности —дифференциальной и независимой.