Чужая война часть 2 - 12
- Опубликовано: 11.06.2022, 08:28
- Просмотров: 27988
Содержание материала
Подводная война: тайна, но не секрет
«Безмолвная служба, она никогда не жалуется и никогда не дает объяснений», — так называли весь Королевский флот. Но в наши дни это особенно уместно применительно к подводным и противолодочным подразделениям, которые играют в кошки-мышки под водой.
ПОДВОДНАЯ ВОЙНА — это холодное, бесшумное и невидимое дело, в котором люди над водой и под водой используют оружие высочайшей технологической сложности. В этих смертельных столкновениях не может быть места для ошибки. Очень немногие военно-морские силы желают пролить свет на состязание в кошки-мышки из-за боязни поставить под угрозу безопасность тех, кто в нем участвует. Действия британских и аргентинских подводных лодок во время войны за Фолклендские острова неизбежно окутаны завесой секретности. Сегодняшние подводные лодки работают быстро, бесшумно и глубоко, и оснащены управляемым оружием большой дальности, которое практически не предупреждает цель о своем приближении. Они могут участвовать в очень длительных патрулях без базовой поддержки и без командных указаний. Они не уважают ни размер, ни силу, ни скорость, и могут нанести ущерб, который несоизмерим с их собственной стоимостью.

Зрелище, которое никогда не увидит вражеский военный корабль, — подводная лодка Королевского военно-морского флота, греющаяся на поверхности. Эти изящные атомные подводные лодки «охотники-убийцы» (SSN) могут оставаться под водой практически бесконечно, и они были грозным оружием в арсенале оперативной группы. Одна из класса, HMS «Conqueror» 2 мая торпедировала и потопила ARA «General Belgrano». Как прямое следствие, аргентинский флот больше никогда не выходил в море во время боевых действий.
Неудивительно, что подводные лодки ведут одинокий образ жизни, работая по большей части самостоятельно из-за очень больших трудностей со связью под водой. За ними охотятся самые разные самолеты и вертолеты, надводные корабли и другие подводные лодки, их можно выследить с помощью большого количества управляемых компьютером датчиков и уничтожить с помощью целого ряда неприятных видов оружия. Если подводная лодка обнаружена и поражена, шансов на выживание практически нет. Даже когда подводнику не угрожает прямая угроза нападения, его тесная металлическая обстановка создает значительное психологическое напряжение. Патрулируя, возможно, в течение нескольких месяцев, лишенный видимости солнца или естественного разделения дня и ночи, подводник должен использовать значительные внутренние ресурсы только для того, чтобы поддерживать свою устойчивость. Во время долгого путешествия команда HMS«Conqueror» организовала «спонсорский ход», чтобы собрать деньги для больных.

Бездна...
Сонарные операции
Изоляция жизни под водой усугубляется тем фактом, что радио, радар, видимый свет, инфракрасное и рентгеновское излучение плохо распространяются в воде, если вообще распространяются. Звук, с другой стороны, распространяется в воде примерно в четыре с половиной раза быстрее, чем в воздухе (около 3355 миль в час (5400 км) по сравнению с примерно 770 миль в час (1240 км)). Это означает, что звук можно услышать на расстоянии десятков миль, и его можно заставить двигаться к цели и возвращаться в виде эха от цели, находящейся на расстоянии нескольких миль. Таким образом, в подводной войне наука о звуке является единственной первостепенной областью технических интересов. Чтобы понять характер встречи с «Belgrano», мы должны начать с фактов работы гидролокатора.
Существует два режима работы гидролокатора: прослушивание (пассивный гидролокатор) и передача для прослушивания эха (активный гидролокатор). Пассивный гидролокатор может обеспечить значительную дальность обнаружения. Он может определить местонахождение цели и сам остаться незамеченным, поскольку сам он молчит. Только когда он начинает издавать шум, цель может его обнаружить и принять соответствующие контрмеры. Недостатком пассивного гидролокатора является то, что он не дает информации о дальности и плохая информация о пеленге цели, даже если акустические сигналы нескольких пассивных гидролокаторов триангулированы с помощью компьютерной обработки. В результате пассивный гидролокатор используется в основном для раннего предупреждения о присутствии подводной лодки.
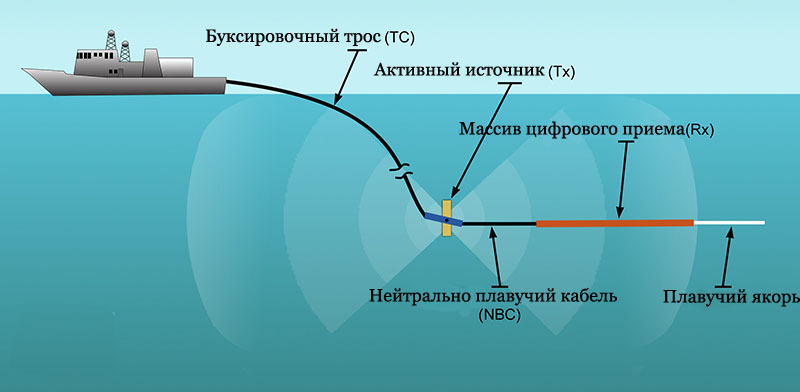
Недавно приобретенный Королевским военно-морским флотом Канады, TRAPS представляет собой низкочастотный (НЧ) гидролокатор переменной глубины, предназначенный для обнаружения, отслеживания и классификации подводных лодок, сверхмалых подводных лодок, надводных кораблей и торпед. Акустические элементы его «мокрой части» буксируемых решеток представляют собой вертикальный проектор и приемную решетку. Уникальным преимуществом TRAPS является то, что его прожекторная решетка сматывается и укладывается на барабан лебедки вместе с приемной решеткой и буксировочным тросом. Эта система позволит Королевскому военно-морскому флоту Канады расширить возможности таких кораблей, как Kingston и Henry Dewolfe Class, до роли противолодочных кораблей.
Формирование целеуказания для нападения на подводную лодку обычно осуществляется активным гидролокатором. При работе в активном режиме дальность сонара может быть уменьшена на одну пятую. При надлежащей обработке возвращенного эха активный гидролокатор может достаточно точно определить дальность, пеленг и глубину информации для организации атаки. При этом активный сонар передает отчетливо слышимый звук, печально известный «пинг» фильмов о подводных войнах. Этот «пинг» не только предупреждает капитана подводной лодки о том, что его обнаружили, но он также может быть отчетливо слышен на больших расстояниях, чем те, на которых эхо «пинга» может быть услышано противником. Если активный гидролокатор используется преждевременно, подводная лодка может предпринять действия по уклонению, возможно, вынуждая ее прекратить атаку, но позволяя ей снова сражаться. Таким образом, активный гидролокатор является обоюдоострым оружием, и его использование всегда требует тщательно продуманного командного решения.
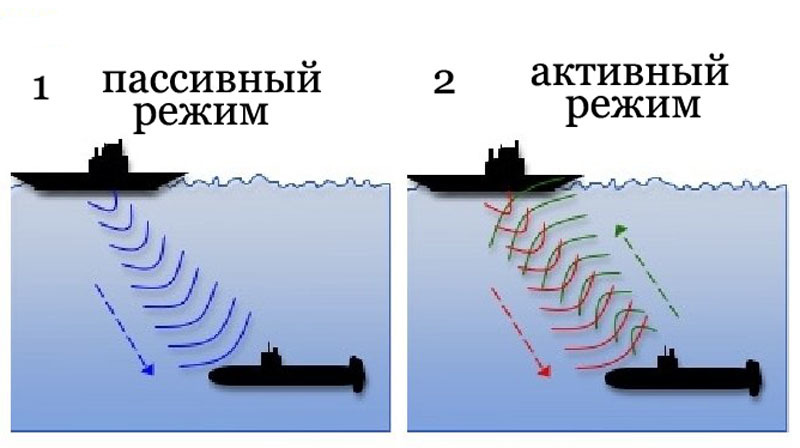
Два разных типа сонара.1 Чаще всего используется пассивный гидролокатор: подводная лодка «слышит?» по звуку корабельных двигателей и носовой волне, чтобы определить его положение и курс. 2 Активный гидролокатор требует, чтобы подводная лодка излучала «пинг», который отражается обратно к подводной лодке надводной целью. К сожалению, активный гидролокатор оставляет субмарину открытой для обнаружения, поэтому сегодня он редко используется.
Структура моря
Искусство противолодочной войны (ПЛО) вращается вокруг этих командных решений, но не все находится под контролем военно-морских капитанов и адмиралов. Осложняет смертельную игру ПЛО тот факт, что море имеет сложную структуру, которая постоянно находится в состоянии изменения. Эта структура с ее различиями в температуре, давлении, солености, погодными эффектами на поверхности, течениями и морской жизнью, а также искажающими эффектами морского дна очень затрудняет интерпретацию акустической информации. В дополнение к отражению, преломлению и искажению акустического сигнала — при условии, что его вообще можно услышать за пределами какофонии морских шумов — блок обработки должен работать против шума, создаваемого самим кораблем или подводной лодкой. Тем не менее, с чувствительным оборудованием могут происходить экстраординарные обнаружения. В 1974 году американская система акустического наблюдения Sea Spider (система стационарных пассивных гидролокаторов, установленных на морском дне) смогла услышать случайный взрыв в российской подводной лодке и его последующее воздействие на морское дно на расстоянии 650 морских миль (больше, чем расстояние между Великобританией и Исландией). Военно-морской флот США использует аналогичную систему стратегического наблюдения за морским дном в Северной Атлантике.
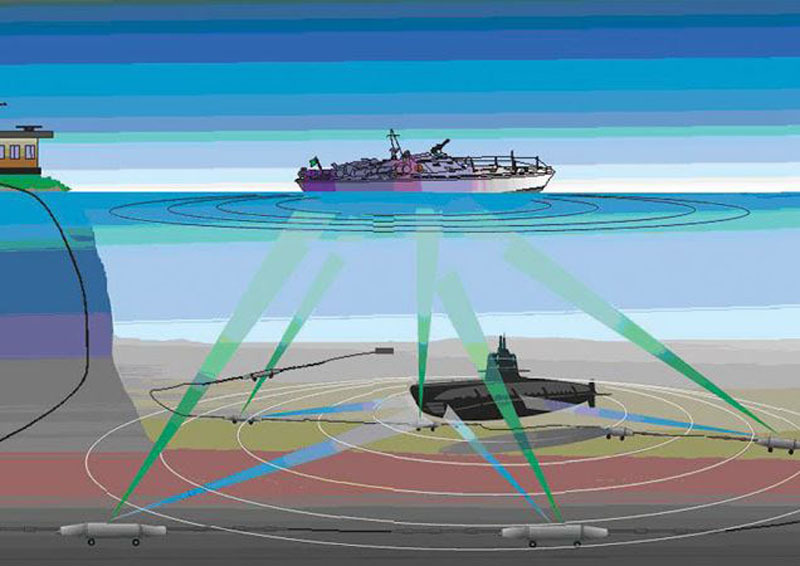
Над морским дном система SOSUS обнаруживает звуки подводной лодки, и массив автоматически информирует береговую станцию (слева), или узлы массива могут передавать акустические, VLF или ELF сигналы, чтобы предупредить противолодочный корвет (наверху).
Но такой системы не было в Южноатлантическом конфликте. Бремя наблюдения лежало на задействованных кораблях.
И британские, и аргентинские подводные лодки, и их надводные охотники столкнулись с более серьезными тактическими проблемами, чем потеря стратегической (т.е. очень общей цели) информации, поскольку условия операции в Южной Атлантике были далеки от идеальных.
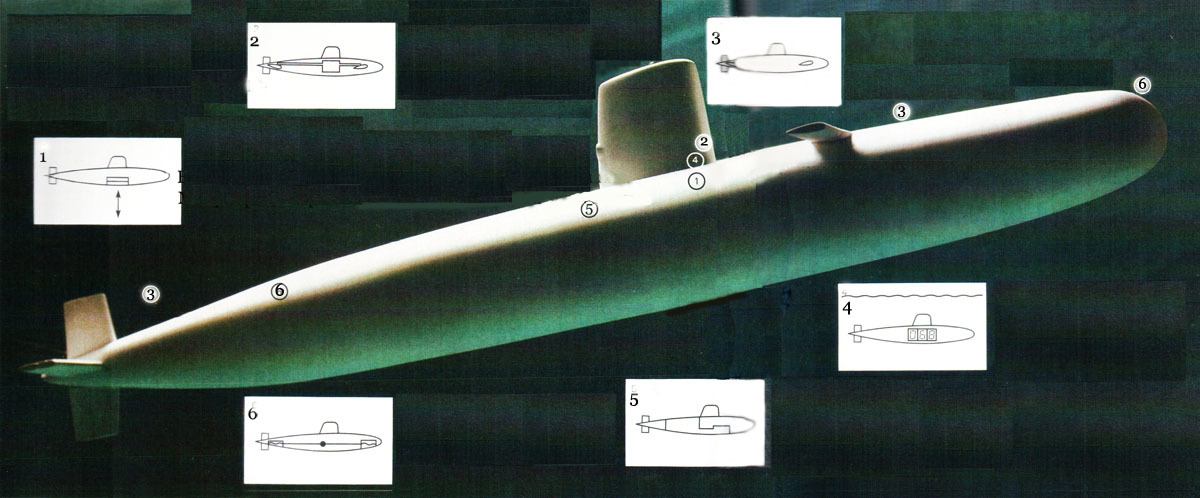
1. ЗАВИСАНИЕ: Точный контроль глубины в условиях зависания. Высокоточные прецизионные регулирующие клапаны. Микропроцессорный автопилот управления зависанием.
2. ГЛУБИНА И КОНТРОЛЬ КУРСА: Ручное или автоматическое управление углом глиссирования. Встроенная консоль оператора для управления одним человеком. Подходит для обычных или X-образных плоскостей. Автопилот на базе микропроцессора. Включает в себя цифровые каналы передачи.
3. УПРАВЛЕНИЕ ГИДРОПЛАНОМ: Высокая точность позиционирования угла руля. Прецизионный сервоклапан напрямую соединен с гидравлическим цилиндром. Двойное независимое управление моментным двигателем сервоклапана. Встроенный переключающий клапан для позиционного или независимого аварийного управления скоростью.
4. ДАННЫЕ О ГЛУБИНЕ И ИНДИКАЦИЯ: Измерение глубины давления с очень высокой точностью. Цифровые или аналоговые выходные сигналы датчика. Блоки ретрансляции для интеграции с корабельным вооружением, системами навигации, гидроакустики и управления.
5. КОНТРОЛЬ И НАБЛЮДЕНИЕ: Комплексные системы мониторинга и контроля, включая: Главный двигатель. Групповое управление техникой. Продувочные и выпускные клапаны балластных цистерн. Обнаружение пожара. Автоматический, полуавтоматический или локальный ручной аварийный режим. Центральный пульт наблюдения.
6. ДИФФЕРЕНТ И ВЫРАВНИВАНИЕ: Автоматическая оценка погрешностей дифферента и плавучести. Программное обеспечение на базе микропроцессора. Полностью автоматический или ручной режимы коррекции.
При всех своих огромных размерах подводные лодки требуют тончайших механизмов управления: при навигации по морскому дну или по слоям горячей или холодной воды, чтобы избежать обнаружения гидролокатором, необходимы тончайшие настройки.Обычный крейсерский режим требует такой же осторожности, так как ошибки в дифферентовке могут привести к потере скорости и большему количеству шума.
Суровые и штормовые условия на поверхности, как правило, маскировали пассивные гидролокаторы высоким уровнем фонового шума и в то же время подавляли активные гидролокаторы. Это ухудшение характеристик сонара должно было помочь противнику, сохраняя его укрытие в течение более длительного времени. Однако такое преимущество имеет ограниченное применение, если атакующий испытывает значительные трудности в отслеживании своей цели и вынужден подходить вплотную (тем самым увеличивая риск своего собственного обнаружения) или запускать свои торпеды с большого расстояния по неопределенной цели. Условия Фолклендского конфликта низвели противолодочные операции до уровня войны, ведущейся чуть ли не вслепую, со всеми вытекающими отсюда просторами для промахов и давления на участников боевых действий.
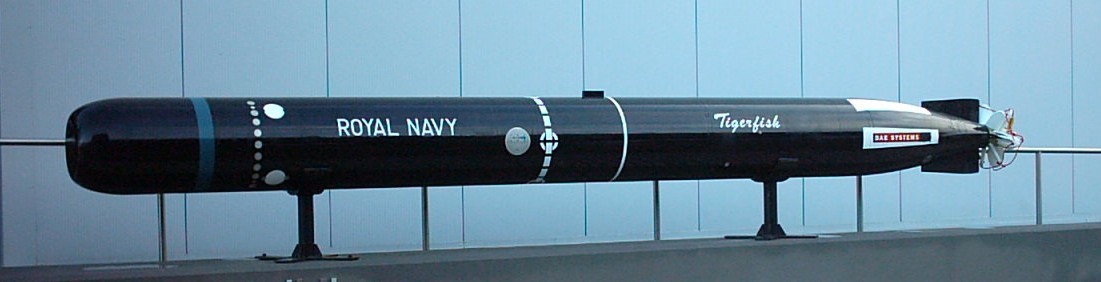
Основным вооружением ПЛА является торпеда MK24 Tigerfish, скоростная истребительница кораблей. Проводное наведение направляет торпеду близко к цели — кораблю или подводной лодке, — в то время как ее собственная акустическая система самонаведения делает все остальное, направляя торпеду на последнем заходе к почти гарантированному поражению.
Риски «подводного плавания»
Осторожность — девиз всех командиров подводных лодок, особенно тех, кто плавает на дизель-электрических кораблях. В противолодочной войне принципиальное различие между подводными лодками заключается не в их вооружении или гидролокаторах, а в способе их движения — ядерном или дизель-электрическом — и серьезных тактических последствиях, которые это имеет, особенно для дизель-электрических типов. Дизель-электрическая подводная лодка может работать в подводном положении на своих электродвигателях, но батареи, питающие эти двигатели, имеют ограниченный запас энергии, прежде чем разрядятся. Для подзарядки аккумуляторов подводная лодка должна работать на своих дизельных двигателях. Дизельным двигателям, однако, нужен воздух, поэтому подводной лодке приходится поднимать над поверхностью «snort» («дыхательную») мачту в качестве воздухозаборника. Подъем «snort» мачты делает подводную лодку уязвимой для обнаружения с помощью радара, визуального наблюдения и улавливания инфракрасного излучения ее дизельного выхлопа.
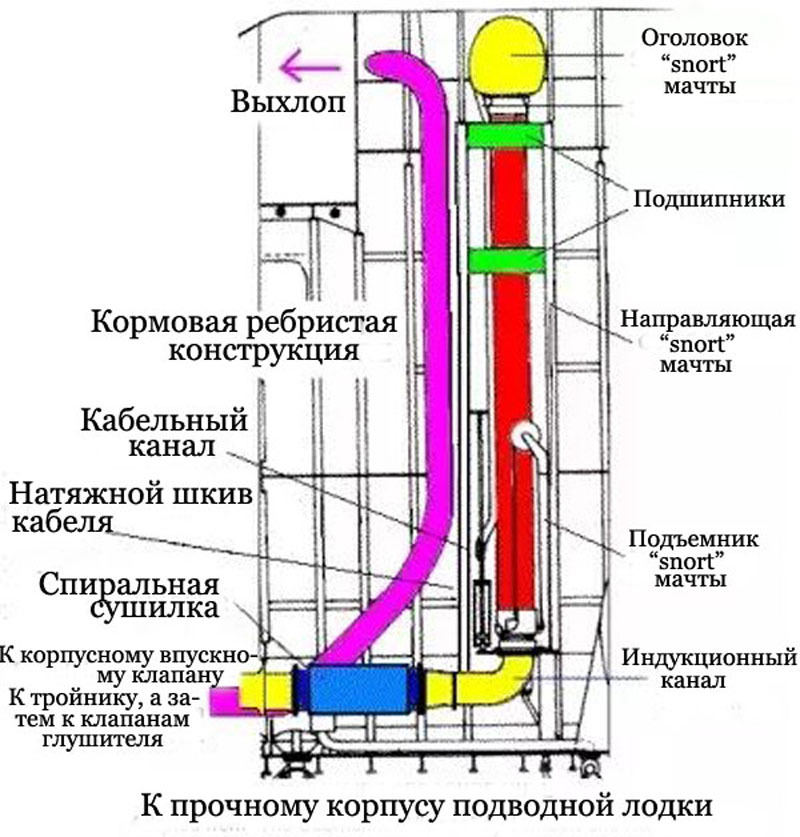
Выхлопная система подводной лодки.
Более того, перезарядка аккумуляторов или «сноркелинг» (Сноркелинг (снорклинг) (нем. Schnorchel — дыхательная трубка) — вид плавания под поверхностью воды с маской и дыхательной трубкой и обычно с ластами, в данном случае – подвсплытие) — это шумная операция, которая ухудшает работу гидролокаторов подводной лодки и увеличивает риск обнаружения. Дизель-электрические подводные лодки (известные как ДЭПЛ) стараются избегать подводного плавания, особенно вблизи противника. Но скорость ПЛПЛ (подводных лодок) является самым большим фактором, определяющим частоту сноркелинга На максимальной подводной скорости (22 узла для аргентинского SSK Type 209/1 «Salta» Class) SSK должна всплывать уже через час или около того. При гораздо меньшей скорости можно оставаться под водой более 24 часов. Это ограничение не распространяется на атомные подводные лодки (ПЛА).
Хотя противокорабельные ракеты, такие как запускаемая с подводных лодок версия «Exocet», готовы к поступлению на вооружение, торпеда остается основным подводным вооружением для подводных и надводных целей. Подводные лодки несут тяжелые торпеды; надводные корабли и авиация вооружены облегченной версией. Тяжелые торпеды имеют больший радиус действия и более мощные головки самонаведения, которые связаны с подводной лодкой (и, следовательно, гидролокаторами подводной лодки и компьютерами управления огнем) проводом.

Современная кабельная торпеда, такая как Mk 48 ADCAP, имеет около 30 км троса, 1/2 которого намотана в корму торпеды, а другая половина - в бухте в торпедном аппарате. По мере движения оружия освобождается трос;по мере движения корабля провод выходит из катушки через внешний порт.Теория состоит в том, что ни корабль, ни оружие не «дергают» проволоку, чтобы не порвать ее.Но иногда провод рвется.
Тяжелые торпеды также имеют более мощные боеголовки для борьбы с более крупными надводными целями. Оба типа торпед обычно имеют активные/пассивные гидролокаторы в своих головках самонаведения и предварительно запрограммированные схемы поиска, если им не удается установить гидроакустический контакт (или если провод заканчивается на тяжелой торпеде).
Дальность действия тяжеловеса, такого как британская Mark 24 Tigerfish, составляет около 17 морских миль, хотя она будет меньше, если торпеда движется со скоростью 35 узлов (самая высокая скорость).
Если подводная лодка-мишень поражена торпедой, то она почти наверняка будет уничтожена, так как любой разрыв прочного корпуса может привести к ее затоплению. Надводные корабли менее уязвимы для торпедных ударов. Тем не менее, существует высокая вероятность того, что даже одно попадание потопит почти любой надводный корабль, хотя по самым крупным целям почти наверняка потребуется запуск нескольких торпед, чтобы окончательно решить проблему.
Батарея датчиков
Огромный набор датчиков используется для обнаружения подводной лодки. Гидролокаторы могут быть установлены на корпусе либо рядом с носом на надводном корабле, либо вокруг носа на подводной лодке. Это самые мощные тактические гидролокаторы, и часто они очень большие, достигая 70 футов (22м) в подводной лодке. Гидролокаторы переменной глубины устанавливаются на надводных кораблях, и тот же принцип гидролокатора, подвешенного на тросе, также используется вертолетами, где он известен как «погружной гидролокатор». Наконец, самолеты и вертолеты могут сбрасывать гидроакустические буи (активные или пассивные). Другие датчики, обычно устанавливаемые на самолетах или надводных кораблях, включают в себя радар, средства электронного наблюдения (для обнаружения радиопередач), детекторы (для обнаружения выхлопных газов при подводном плавании) и детекторы инфракрасных и магнитных аномалий.
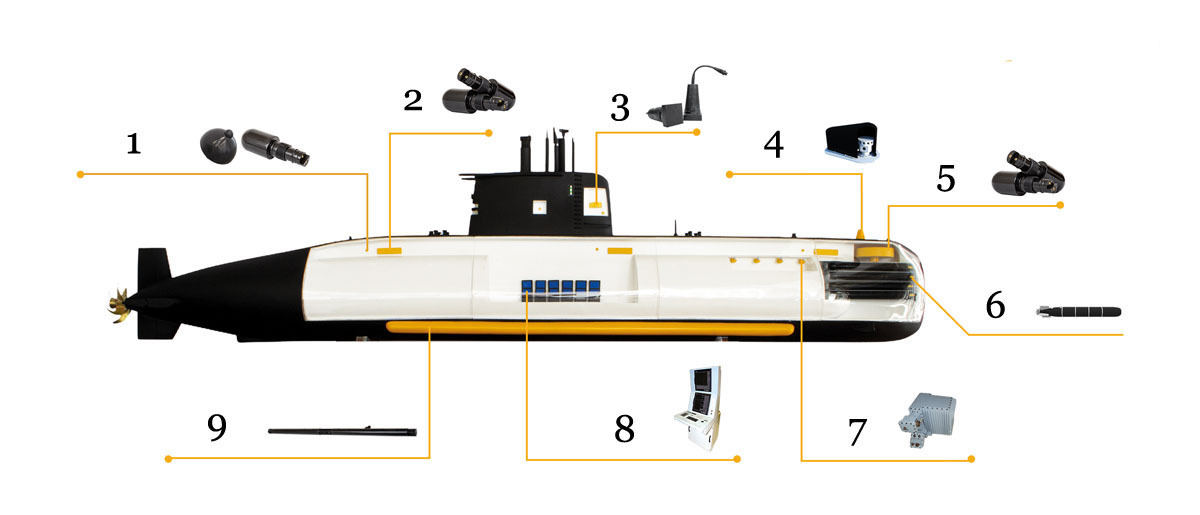
Элементы подводного гидролокатора...
1 Группа датчиков обнаружения перехвата и определения дальности. 2 Пассивный сонар для определения дальности MSH-01. 3 Цилиндрическая матрица преобразователя. 4 Пассивный сонарный массив IPS Intercept. 5 Цилиндрическая гидрофонная решетка MSH-01. 6 Акустическая головка торпеды. 7 Интегрированные гидроакустические электронные системы. 8 Интегрированная система управления подводным боем, гидроакустическая консоль и сопутствующие аппаратные и программные средства. 9 Гидроакустическая группа фланговой антенной решетки MSH-11
Королевский флот хорошо оснащен полным набором сенсорных систем, и это побудило бы аргентинских командиров подводных лодок проявлять крайнюю осторожность. Потопление крупного надводного корабля, в частности авианосца, оказалось не под силу аргентинским подводным лодкам, в первую очередь из-за круглосуточной напряженной работы британских противолодочных сил. Они не могли позволить себе ослабить бдительность ни на мгновение. Британские противолодочные силы приняли очень либеральное определение того, что они считали угрозой, и очень жестко реагировали на все контакты. К сожалению, киты и подводные лодки имеют одинаковую форму и акустическую сигнатуру. Несомненно, что большое количество, а возможно, даже большинство атак ПЛО было направлено против этих безобидных млекопитающих. Шум, вызванный этими атаками, был бы отмечен любой аргентинской подводной лодкой в этом районе. Несомненно, это должно было убедить аргентинского капитана в опасности, которой он собирался подвергнуть себя и свою команду из 31 человека. Используя гидролокаторы вокруг авианосцев в активном режиме, британцы могли добиться такого же психологического воздействия на командира аргентинской подводной лодки. Полоса шумной воды, создаваемой вокруг авианосцев, будет слышна аргентинцам, когда они будут приближаться к ней, что даст им возможность избежать экрана, в котором вероятность обнаружения будет высокой.
Фактор скорости
Недостаток скорости был еще одной проблемой, мучившей командира аргентинской подводной лодки. Он был плохо подготовлен, чтобы убегать от неприятностей. Хуже того, он знал, что ему придется атаковать британские авианосцы с позиции впереди оперативной группы. (Если бы его подводная лодка находилась в корме оперативной группы, он просто не смог бы догнать более быстрые надводные корабли.)
Контр-адмирал Вудворд, бывший подводник, должен был знать, что передняя позиция была наиболее вероятным районом, откуда можно было ожидать атаки подводной лодки, и развернул бы ряд своих противолодочных средств, особенно свои противолодочные вертолеты Sea King, на эту позицию. Эти вертолеты, используя свои гидролокаторы в активном режиме, сбили бы с толку командира аргентинской подводной лодки, который, в свою очередь, не смог бы установить положение этих активных гидролокаторов, когда они беспорядочно погружались в воду и выходили из нее. Вдобавок к его замешательству надводные корабли следовали зигзагообразным курсом. Эти факторы встревожили бы даже самых крутых офицеров и их небольшую команду новобранцев.
Наконец, география не благоприятствовала аргентинцам. Лучшая тактика для SSK (подводных лодок) - затаиться в узком канале (где акустические условия очень плохие) и позволить своей цели проплыть над ним. Хотя Фолклендский пролив предлагал такую тактику, он мог быть перекрыт британскими противолодочными подразделениями. Несмотря на тысячи часов, посвященных ПЛО британскими подводными лодками, надводными кораблями, вертолетами и дальними патрульными самолетами, подтвержденного контакта с аргентинской подводной лодкой, за исключением «Sante Fe» («Санте-Фе»), не было: проще говоря, британская оборона была слишком решительной, чтобы не дать аргентинцам шанс на успех.
Легче установить, почему британские ПЛА и ДЭПЛ не добились большего. После потери «General Belgrano» у них больше не было целей. У ВМС Аргентины не было противолодочных сил для защиты своих кораблей, и вполне вероятно, что дальнейшие боевые вылеты привели бы к бессмысленным потерям.