
Неизвестный танк часть 5 - 11
- Опубликовано: 23.04.2016, 13:59
- Просмотров: 121315
Содержание материала
ДВОЙНОЙ ДИФФЕРЕНЦИАЛ
Двойные дифференциалы, так же как и простые, бывают конические и цилиндрические. На рис. 508 показана схема трансмиссии с двойным( коническим дифференциалом.
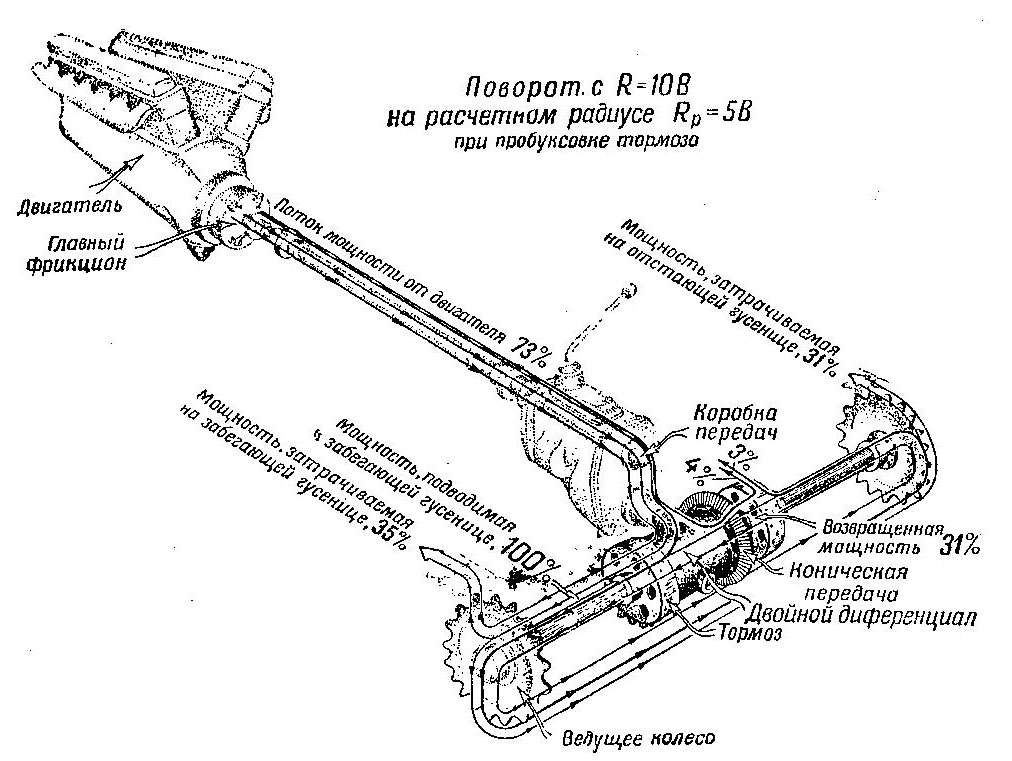
Рис. 508 Схема трансмиссии с двойным дифференциалом
Схема двойного конического дифференциала показана на рис, 509.
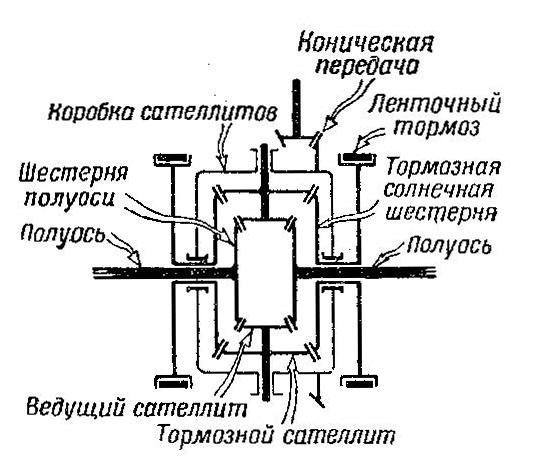
Рис. 509 Схема двойного коническогодифференциала
Двойной конический дифференциал (рис. 510), так же как и двойной цилиндрический (рис. 511), отличается от простого тем, что имеет с каждой стороны по две солнечные шестерни — шестерню полуоси и тормозную — и двойные сателлиты — ведущий и тормозной.
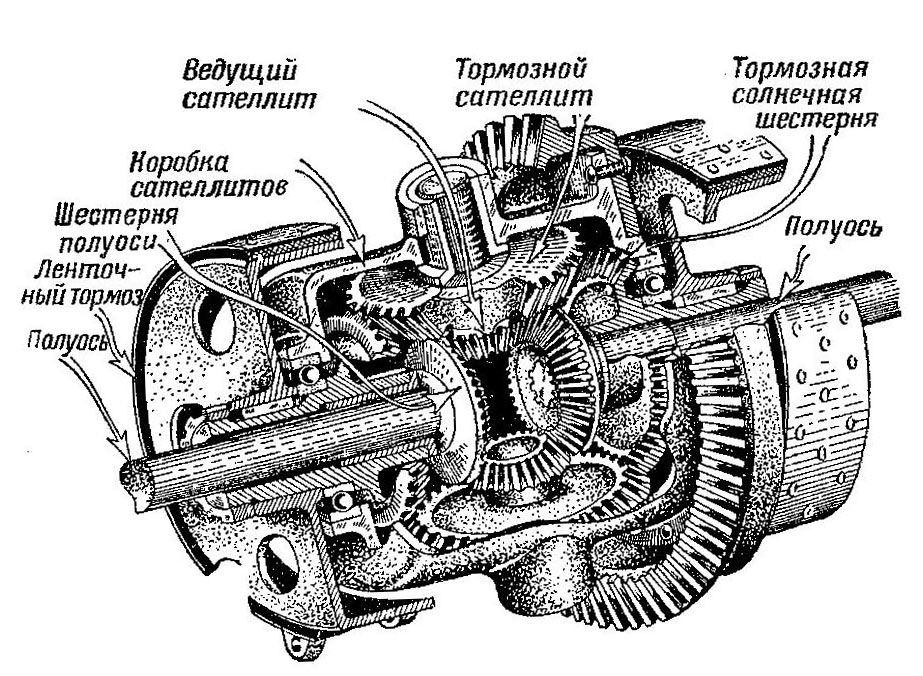
Рис. 510 Устройство двойного конического дифференциала
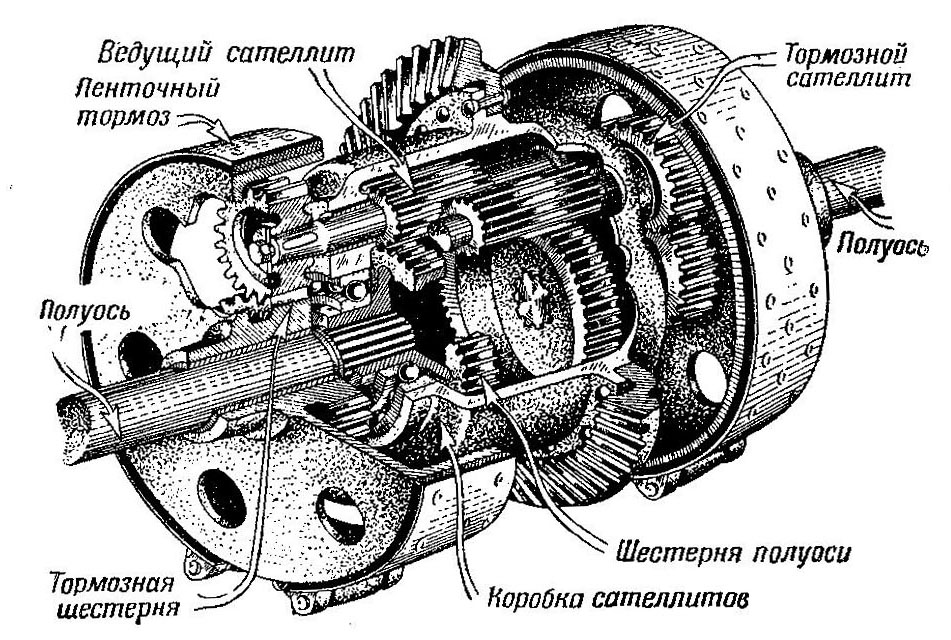
Рис. 511 Устройство двойного цилиндрического дифференциала
Отсюда и название двойной дифференциал. Тормозные барабаны в двойном дифференциале установлены не на полуосях, как в простом дифференциале, а жестко связаны с тормозными солнечными шестернями.
Когда тормоза отпущены и сопротивления на обеих гусеницах равны, двойной дифференциал работает точно так же, как простой: сателлиты не вращаются вокруг своих осей, а увлекают обе шестерни полуосей с одинаковой скоростью. Обороты полуосей равны оборотам коробки сателлитов, и танк движется прямолинейно.
Если полностью затянуть один из тормозов, например правый, тормозная шестерня остановится. Как и при остановке шестерни полуоси в простом дифференциале, сателлит начнет вращаться вокруг своей оси, ускоряя вращение левой тормозной шестерни. Вместе с тормозным сателлитом начнет вращаться ведущий сателлит, посаженный с ним на одну ось. Ведущий сателлит находится в зацеплении с шестернями полуосей. Вращаясь, он замедляет вращение отстающей полуоси к ускоряет вращение забегающей: танк поворачивается.
Тот радиус, на котором танк поворачивается при полностью затянутом тормозе, будет расчетным, так как он наименьший; при этом радиусе мощность в тормозах не расходуется. У танка с простым дифференциалом отстающая гусеница при полностью затянутом тормозе останавливалась и расчетный радиус равнялся ширине колеи В, При двойном дифференциале расчетный радиус всегда больше ширины колеи, т. е.
Rр > В
В существующих конструкциях двойных дифференциалов расчетный радиус находится в пределах от 2В до 5В.
Так как расчетный радиус — наименьший, танк с двойным дифференциалом не может поворачиваться вокруг неподвижной гусеницы, как это возможно при простом дифференциале или бортовых фрикционах, поэтому поворотливость танка ухудшается. Можно подобрать шестерни двойного дифференциала так, что расчетный радиус будет равен В, как у простого дифференциала. Но тогда двойной дифференциал станет работать, как простой, и потеряет все преимущества, которые он имеет по сравнению с ним.
При повороте танка с двойным дифференциалом на расчетном радиусе вся мощность двигателя идет на преодоление внешних сопротивлений, как у всякого механизма поворота. Поворот с радиусом больше расчетного сопровождается пробуксовкой тормоза; при этом скорость забегающей гусеницы увеличивается, а отстающей уменьшается, хотя и не на столько, как при полной затяжке тормоза.
На рис. 508 показано распределение мощности при повороте с радиусом R=10В, когда расчетный радиус Rр= 5 В. Поскольку тормозана полуоси нет, мощность с отстающей гусеницы может возвращаться на забегающую гусеницу, т. е. в этом механизме происходит циркуляция мощности. В связи с этим уменьшаются потери мощности в тормозе; в нашем примере они составляют 3%, поэтому из 100% мощности, которая подводится на забегающую гусеницу, только 69% рщет от двигателя, а 31 % — от отстающей гусеницы.
4% мощности поступает к тормозу непосредственно от двигателя (сравните простой дифференциал, рис. 503), так что всего в тормозе затрачивается 7% мощности, т. е. несколько больше, чем у бортовой коробки или планетарного механизма с тем же расчетным радиусом. Но все же на этом радиусе поворота (10В) потеря мощности в тормозе в 5 раз меньше, чем у бортового фрикциона, и почти в 20 раз меньше, чем у простого дифференциала. При меньших расчетных радиусах выигрыш в мощности меньше, но даже при Rр=2В двойной дифференциал расходует в 4—5 раз меньше мощности в тормозах, чем простой, и примерно вдвое меньше, чем бортовой фрикцион.
Недостаток двойного дифференциала — ограниченная поворотливость танка вследствие большого расчетного радиуса (больше В).
Кроме того, двойному дифференциалу, как и всем вообще дифференциальным механизмам, присущ другой серьезный недостаток. Если сопротивление движению одной из гусениц станет больше, чем другой, например, если одна из гусениц погрузится в грязь или снег или если танк движется с креном на борт, танк будет «уводить» в сторону; как и при торможении одной полуоси, сателлиты начнут вращаться вокруг своих осей, ускоряя движение той гусеницы, на которой сопротивление меньше. При движении придется постоянно выравнивать танк тормозом, что усилит износ тормоза.
Если одна из гусениц буксует или сорвана, танк с дифференциалом перестает двигаться.
Выше указывалось, что скорость вращения полуосей танков с дифференциальными механизмами одинакова лишь в случае одинакового сопротивления на полуосях. Сопротивление движению танка под буксующей гусеницей значительно меньше, чем под той гусеиицей, где буксования нет, поэтому небуксующая гусеница останется неподвижной, а буксующая гусеница будет вращаться с удвоенной скоростью. Чтобы сдвинуть танк с места, надо затянуть тормоз буксующей гусеницы,